CNC Robot Besleme Sistemleri: Otomatik Yükleme, Entegrasyon ve Uygulamalar
CNC torna ve işleme merkezlerinde robotla parça yükleme/boşaltma, çevrim sürelerini düşürür, kaliteyi standartlaştırır ve operatör bağımlılığını azaltır. Bu sayfada CNC robot besleme sistemlerinin çalışma mantığını, hücre bileşenlerini, güvenlik ve verim kriterlerini kısa ama sahada karşılığı olan şekilde özetledik.
CNC Robot Besleme Nedir?
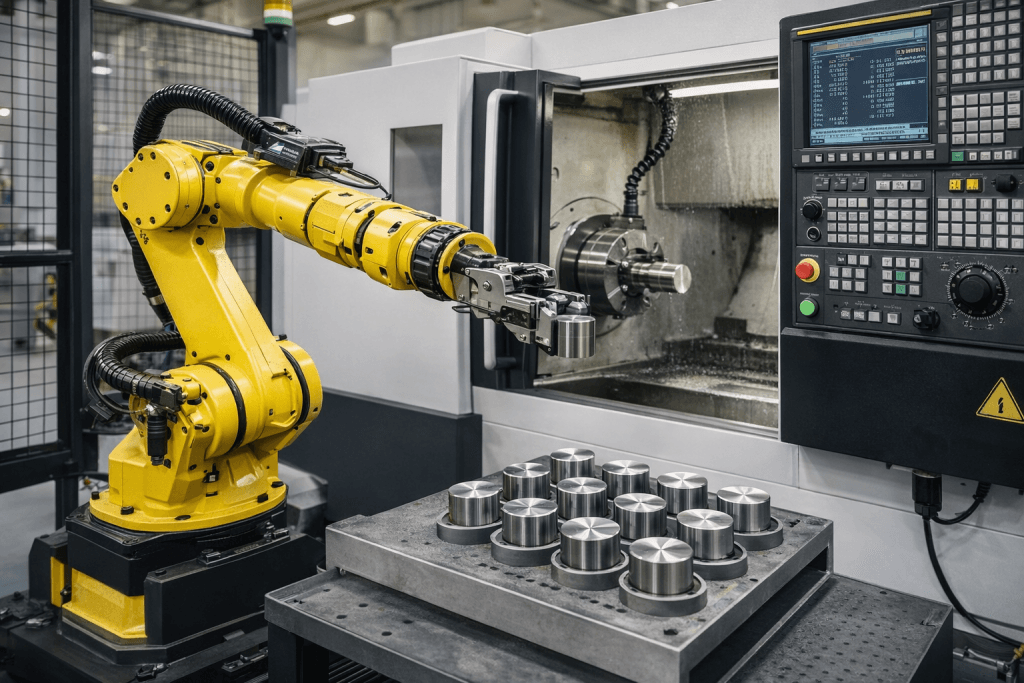
CNC robot besleme; bir endüstriyel robotun parçayı otomatik olarak CNC’ye yüklemesi, işleme sonrası parçayı boşaltması ve gerekirse ölçüm/istif/markalama gibi adımlara yönlendirmesidir. Amaç sadece “kol gücünü” azaltmak değil; üretimi standardize etmek ve çevrim süresini tahmin edilebilir hale getirmektir.
- Çevrim süresi düşer: Kapı aç-kapat, yükle/boşalt hareketleri optimize edilir.
- Kalite stabil olur: Parça yerleşimi, sıkma sırası ve prosedür aynı kalır.
- Vardiya sürdürülebilirliği artar: Operatör bulunabilirliği ve yorgunluk etkisi azalır.
- İş güvenliği iyileşir: Ağır/yağlı/sıcak parçaya insan teması azalır.
Hangi CNC Tiplerinde Robot Besleme Daha Verimlidir?
CNC Torna
Ayna aç/kapat, parça sıkma, kapı yönetimi ve talaş ortamı nedeniyle robot besleme çok hızlı geri dönüş sağlar. Özellikle seri işlerde çevrim süreleri ciddi düşer.
Dik İşleme Merkezi (VMC)
Mengene/palet üzerinde tekrarlı işlerde idealdir. Parça yerleştirme hassasiyeti ve istifleme düzeni ile verim artar.
Yatay İşleme (HMC)
Paletli sistemlerde robot + palet değişimi, yüksek kapasite ve uzun süreli otomasyon senaryoları için uygundur.
Çoklu Tezgâh (Multi-Machine)
Tek robotla birden fazla CNC’ye hizmet verilerek yatırım verimi yükselir. Doğru yerleşim ve zamanlama kritik olur.
Parça çeşidi çok değişken ise; görsel doğrulama, otomatik referanslama veya hızlı değiştirilebilir gripper tasarımı gibi ek çözümlerle sistem daha esnek hale getirilebilir.
Bir CNC Robot Besleme Hücresi Nelerden Oluşur?
- Endüstriyel robot: Erişim, payload ve hız gereksinimine göre seçilir.
- Gripper (kavrayıcı): Tek/çift parça taşıma, değiştirilebilir çene, vakum veya mekanik tutma seçenekleri.
- Parça besleme/istif: Tepsi, palet, konveyör, döner tabla veya magazin yapısı.
- Haberleşme (handshake): CNC M-kod, dijital I/O, fieldbus; kapı/çene/iş bitiş sinyalleri güvenli yönetilir.
- Güvenlik: Çit, emniyet rölesi/PLC, ışık bariyeri, kapı kilidi ve risk analizi.
- Opsiyonel: Parça yön kontrolü, ölçüm, barkod/markalama, çapak alma, yıkama veya istasyonlar.
Çevrim Süresi Nasıl Düşürülür? (Sahada İşe Yarayan İpuçları)
Çift parça stratejisi
Robot bir parçayı boşaltırken diğerini yükleyecek şekilde gripper tasarımı yapılabilir.
Kapı/çene zamanlaması
Kapı açma-kapama ve ayna/mengene komutları paralel planlanır.
Poka-yoke kontrol
Parça var/yok, yön kontrolü, kavrama basıncı gibi basit kontroller rework’ü azaltır.
Yerleşim optimizasyonu
Robot-CNC-tepsi mesafeleri doğru kurulur; gereksiz yol ve dönüşler azaltılır.
Çevrim süresinde çoğu zaman kazanç; robot hızını artırmaktan çok, gereksiz beklemeleri ve gereksiz hareketleri azaltarak elde edilir.
Güvenlik ve Kalite İçin Olmazsa Olmazlar
- Risk analizi: Hücre tasarımında senaryolar (kapı açık, parça düşmesi, sıkışma) düşünülür.
- Emniyet çevrimi: Kilitli kapı, güvenlik PLC/role, acil stop zinciri doğru kurgulanır.
- Hata stratejisi: Robot/CNC hata kodları için güvenli “dur-çekil-uyar” yaklaşımı uygulanır.
- Kavrama doğrulama: Basınç sensörü, parça var/yok kontrolü, tutuş teyidi ile düşme riski azaltılır.
- Bakım rutini: Gripper çeneleri, hava hattı, vakum filtresi, tepsi düzeni ve temizliği standardize edilir.
Mate Robotic ile CNC Robot Besleme Projenizi Başlatın
Parça tipiniz, üretim adediniz, çevrim hedefiniz ve mevcut CNC altyapınıza göre en doğru hücre mimarisini birlikte belirleyebiliriz. Tasarım, devreye alma, operatör eğitimi ve bakım planı dahil uçtan uca destek sağlıyoruz.