KUKA Robotlarda BASE nedir ve ne işe yarar?
Robot Programlamada Base Tanımlamanın Mantığı ve Önemi
Öncelikle temel mantığı kavramak gerekir. Base tanımlama, robot programlamasında bize ciddi bir kolaylık sağlar ve program yazma sürecini hem daha hızlı hem de daha kararlı hale getirir.
Bir örnek üzerinden gidelim:
Bir fikstürden robot ile parça alacağımızı ya da eğimli bir yüzey üzerinde KUKA robot ile kaynak yapacağımızı düşünelim. Robot markası ne olursa olsun (KUKA, FANUC, ABB, Yaskawa), base mantığı tüm endüstriyel robotlarda aynıdır.
Gerçek hayatta hiçbir yüzey %100 düz değildir. Zeminlerde, fikstürlerde veya şaselerde mutlaka küçük eğimler ve toleranslar bulunur. Eğer bu yüzeyler için base tanımlaması yapılmazsa, robotu teach ederken TCP’yi düzgün tutmak için sürekli manuel düzeltmeler yapmak gerekir. Bu durum hem zaman kaybettirir hem de hata riskini artırır.
Base Tanımlandığında Ne Değişir?
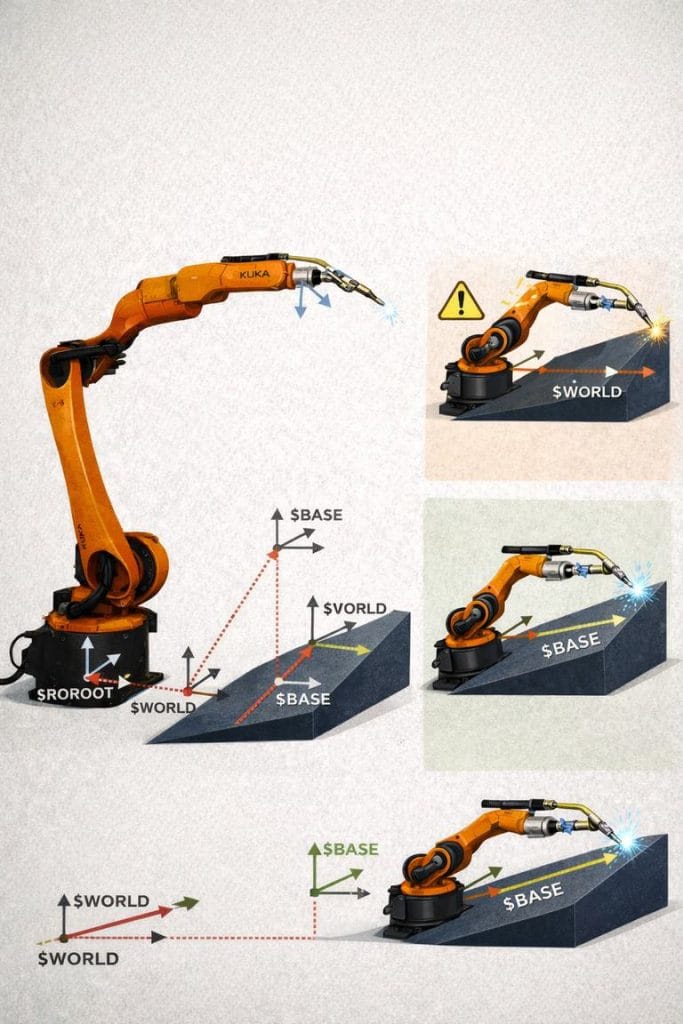
Bir yüzeye base tanımladığımızda, robot kendi XYZ koordinat sistemini o yüzeye göre konumlandırır.
- Z ekseninde hareket ettiğimizde robot, yüzeye dik olacak şekilde hareket eder
- X ve Y eksenleri, yüzeyin kendi yönüne göre çalışır
- Yüzeydeki eğim robot için artık “normal” kabul edilir
Örneğin robot WORLD modunda eğimli bir yüzey üzerinde X yönünde hareket ederse, yüzey yamuk olduğu için robot parça veya yüzeye çarpabilir. Ancak doğru bir base tanımı yapılmışsa, o yamukluk robotun referansı haline gelir. Robot, eğimi kaydeder ve hareketlerini bu yüzeye paralel şekilde gerçekleştirir.
Pratik Kazanımlar
Base tanımlamanın sağladığı avantajlar şunlardır:
- Teach süresi ciddi şekilde kısalır
- Programlar daha okunabilir ve düzenli olur
- Kaynak, yapıştırma, yüzey takibi gibi uygulamalarda kalite artar
- Fikstür veya parça değişimlerinde minimum revizyon gerekir
Özetle; base tanımlamak, robotu yüzeye uydurmak değil, yüzeyi robotun dünyası haline getirmektir. Bu yaklaşım, profesyonel robot programlamanın temel taşlarından biridir.
KUKA Robot Base Nasıl Tanımlanır?
KUKA robotlarda base tanımlama işlemine başlamadan önce doğru menü yolunu takip etmek gerekir. İşlem adımları şu şekildedir:
Öncelikle menüden robot simgesine tıklayın.
Ardından sırasıyla:
İşletime Alma → Tool/Base Yönetimi
Eğer robot arayüzünüz İngilizce ise menü yolu şu şekilde olacaktır:
Start-up → Tool/Base Management
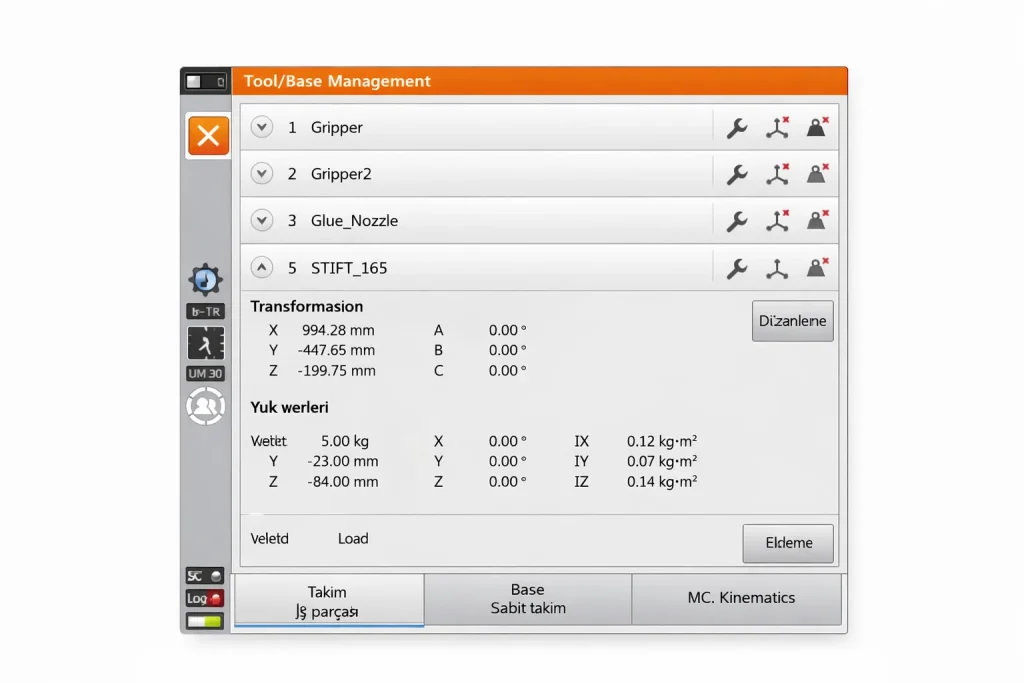
Alt seçeneklerden Base → Sabit takım seçeneğine tıklıyoruz.
Bu alanda Yeni (Ekle) diyerek bir base tanımlaması yapıyoruz.
Oluşturduğumuz base için ilk olarak isim vermemiz gerekiyor.
Örnek olarak:
- CNC alma noktası
- Koli bırakma noktası
- Kaynak fikstürü base
Bu isimlendirme tamamen size kalmış olsa da, program içerisinde akılda kalıcı ve anlamlı isimler kullanmak çok önemlidir. Özellikle büyük projelerde yanlış base seçimini önler ve program okunabilirliğini artırır.
Base Öğretme Mantığı (3 Nokta)
Base tanımlarken 3 adet öğretme işlemi yapmamız gerekir. Bu üç nokta, tanımlayacağımız yüzeyi robotun algılamasını sağlar:
- 1. nokta: Yüzeyin başlangıç noktası
- 2. nokta: Yüzey üzerinde X veya Y yönünü belirleyen nokta
- 3. nokta: Yüzey düzlemini tamamlayan nokta
Bu işlemleri yaparken robotun tool ucunu (gripper veya TCP) yüzeye değdirerek öğretme yaparız.
Bu sayede:
- X ve Y yönleri yüzey üzerinde tanımlanır
- Z ekseni ise yüzeye dik olacak şekilde otomatik oluşur
Sonuçta Ne Olur?
Bu öğretme işlemlerinden sonra robot artık o yüzeyi tanımış olur.
Artık program içerisinde:
- WORLD yerine BASE seçtiğimizde
- XYZ koordinatlarında hareket ettiğimizde
robot, o yüzeyin eğimine ve yönüne göre hareket eder. Yani world veya axis hareketleri yüzeye göre uyarlanır ve robot, tanımlanan base ekseninde doğru ve güvenli şekilde çalışır.
Özetle; base seçildiğinde robot, hareketlerini artık düz zemin gibi kabul ettiği o yüzeye göre gerçekleştirir.
KUKA Robot Base Hakkında Sık Sorulan Sorular
KUKA robotta base nedir?
Base, robotun çalıştığı yüzeye göre tanımlanan koordinat sistemidir. Base tanımlandığında robot, XYZ eksenlerini bu yüzeye göre kabul eder ve hareketlerini yüzeyin eğimine göre gerçekleştirir.
KUKA robot base nasıl tanımlanır?
KUKA robotlarda base tanımlamak için robot simgesinden İşletime Alma → Tool/Base Yönetimi menüsüne girilir. Ardından Base → Sabit takım alanından yeni bir base eklenir ve öğretme işlemi yapılır.
Base tanımlarken isim vermek neden önemlidir?
Base isimleri program içerisinde referans olarak kullanılır. CNC alma noktası, koli bırakma noktası gibi anlamlı isimler verilmesi; yanlış base seçimini önler ve programın okunabilirliğini artırır.
KUKA robotta base öğretme kaç nokta ile yapılır?
Base öğretme işlemi 3 nokta yöntemi ile yapılır. Bu noktalar yüzeyin yönünü, düzlemini ve Z ekseninin yüzeye dik olmasını sağlar.
Base öğretirken robot nereye değdirilir?
Öğretme sırasında robotun tool ucu (gripper veya TCP) yüzeye değdirilir. Bu sayede robot yüzeyin konumunu ve eğimini doğru şekilde algılar.
Base tanımlandıktan sonra robot nasıl hareket eder?
Base seçildiğinde robot, world koordinat sistemi yerine tanımlanan base koordinat sistemine göre hareket eder. XYZ hareketleri yüzeye paralel ve kontrollü şekilde gerçekleşir.
Base tanımlamazsak ne olur?
Base tanımlanmadığında robot world eksenine göre hareket eder ve program yazmayı zorlaştırır.
CNC, paletleme ve kaynak uygulamalarında base neden gereklidir?
CNC alma-bırakma, koli yerleştirme ve kaynak uygulamalarında yüzeyler çoğu zaman eğimlidir. Base tanımı sayesinde robot bu yüzeyleri düz kabul eder ve hassas, tekrarlanabilir hareketler yapar.
Base ile axis veya world hareketi arasındaki fark nedir?
World veya axis hareketleri sabit bir referansa göre çalışır. Base seçildiğinde ise robot, tanımlanan yüzeyin koordinat sistemine göre hareket eder ve yüzeyle uyumlu çalışır.
KUKA Robot Base Tanımlama Desteği
KUKA robot base tanımlama, tool ayarları veya sahadaki uygulamalarınız hakkında destek almak için bizimle iletişime geçebilirsiniz. Uzman ekibimiz size hızlı ve doğru çözüm sunar.
📩 Destek İçin Bizimle İletişime Geçin